Цифровая система контроля и управления радиотелескопом РТ-32
Созданные радиотелескопы предназначены для проведения регулярных радиоинтерферометрических наблюдений по международным и национальным программам. Они также ведут наблюдения в режиме одиночного радиотелескопа по астрофизическим программам. Каждый тип наблюдения предъявляет свои требования к системе автоматического управления телескопом. Наиболее сложные требования предъявляются в случае работы телескопа в международной сети телескопов по программам IVS. Такие наблюдения длятся сутками и состоят из непрерывных повторяющихся циклов, "выход на источник", "сопровождение источника", "выход на следующий источник", "сопровождение" и т.д. Длительность цикла составляет несколько минут. Одновременно в сети может работать до 20 радиотелескопов, расположенных на разных континентах. Поскольку все телескопы в данный момент времени должны синхронно наблюдать один и тот же источник космического излучения, управление телескопом жёстко привязано к системе единого времени всей сети. Такой режим наблюдений может быть реализован только в полностью автоматическом режиме работы телескопа.
Требования к системе управления
Общими требованиями к такой системе автоматического управления являются:
- Работа под управлением центрального компьютера обсерватории с программным обеспечением Mark IV «Field System», либо по заранее подготовленному расписанию, либо в режиме дистанционного управления от центрального компьютера всей сети.
- Высокоточная синхронизация всех процессов с привязкой к шкале единого времени.
- Получение и выдача контрольной информации о состоянии всех подсистем радиотелескопа.
- Высокая отказоустойчивость и надежность системы.
Последнее требование чрезвычайно важно, так как сбои системы автоматического управления могут привести к срывам наблюдений на данном телескопе и на всей сети. Что касается функциональных требований к системе автоматического управления антенной системой (АС) радиотелескопа, то они сводятся к двум противоречивым требованиям: высокой точности наведения и сопровождения источников и высокой скорости перемещений. Для выполнения этих требований электропривод антенной системы радиотелескопа выполнен по двухскоростной схеме и имеет два основных режима управления: "Переброс" и "Сопровождение". В первом режиме обеспечивался плавный, но быстрый разгон, движение на максимальной скорости, плавное торможение и попадание в заданную область углов (в пределах ±2'), обеспечивающую последующий выход на режим "Сопровождение" без рывков и существенных колебаний.
Требование высокой точности наведения и сопровождения определяется диаметром зеркала и рабочей длиной волны. Для самой короткой проектной длины волны λ=1.35 см необходимая точность сопровождения составляет 4″ дуги. В действительности радиотелескоп имеет столь высокие механические характеристики точности антенной системы, что он может эффективно работать на длине волны 7 мм. При этом требования к точности сопровождения возрастают до двух секунд дуги, что обеспечивается на практике благодаря 20 разрядным датчикам положения главных осей антенной системы радиотелескопа.
Структура и параметры системы управления
Объект управления
Антенна, состоящая из опорно-поворотного устройства, основного рефлектора, контррефлектора и вспомогательного оборудования.
Основной рефлектор представляет собой зеркало в виде квазипараболлоида вращения, диаметром 32 м.
Опорно-поворотное устройство альтазимутального типа. Антенна должна вращаться по азимуту и углу места.
Зеркало контррефлектора должно перемещаться по четырем координатам: X,Y-координаты в плоскости, параллельной раскрыву зеркала, Z-координаты вдоль оси параболоида и g - угол поворота относительно оси контррефлектора. Движение по этим координатам обеспечивает оперативное переключение длин волн наблюдения и подстройку "оптической" системы телескопа.
Отсчетные устройства. Для определения положения в пространстве исполнительных осей главного и вторичного зеркал антенны оборудована координатными датчиками:
- устройствами съема угловых координат осей главного зеркала;
- устройством съема угловой координаты вторичного зеркала;
- устройствами съема линейных координат вторичного зеркала.
Устройство съема угловых координат (УСУК) обеспечивает:
- измерение угловых положений исполнительных осей опорно-поворотного устройства антенной системы (азимут и угол места) при скорости не более 2°/сек с суммарной максимальной погрешностью, приведенной ко входу УСУК (ротор индуктосина), равной ±10″ и среднеквадратичной погрешностью не более 7″.
- преобразование результатов измерений в числовые коды;
- выдачу на внешние устройства информации об угловом положении исполнительных осей антенны в виде электрических сигналов в параллельном и последовательном двоичных кодах; индикацию положения исполнительных осей в двоичном коде (градусы, угловые минуты и секунды).
В качестве датчика угла поворота вторичного зеркала используется бесконтактный синус-косинусный вращающийся трансформатор 5БВТ, установленный на исполнительной оси контррефлектора и обеспечивающий определение углового положения с точностью не хуже 2′ В качестве датчиков линейных перемещений также используются синус-косинусные вращающиеся трансформаторы 5БВТ, установленные на ходовых винтах приводов линейных перемещений. С учетом коэффициента передачи редуктора точность датчиков линейного перемещения составляет 0,01 мм.
Аналоговые выходные сигналов датчиков положения КР преобразуются в 14 разрядный двоичный код, который вводится в РСКУ.
Информация о текущем положении КР отображается на мониторе РСКУ.
Электропривод главного зеркала
Электропривод главного зеркала обеспечивает:
- Два вида управления - местное, реализуемое оператором, и внешнее - по сигналам и командам, формируемым аппаратурой автоматического управления.
- два диапазона скоростей вращения антенны: малая скорость, используемая для слежения за объектом, и большая скорость, используемая для переброса антенны
Рабочая станция контроля и управления
Рабочая станция контроля и управления (РСКУ) является центральным управляющим звеном системы наведения, воспринимает команды и целеуказания от центрального компьютера управления радиотелескопом (ЦКУР) и замыкает контур управления антенной.
РСКУ обеспечивает выполнение следующих функций:
- получение информации с датчиков углового положения и квитанций о состоянии электроприводов главного и вторичного зеркал;
- формирование и выдачу команд включения / выключения на электроприводы главного и вторичного зеркал;
- формирование и выдачу аналоговых управляющих сигналов на электроприводы главного и вторичного зеркал;
- привязку к шкале единого времени наблюдательного пункта;
- выдачу информации о состоянии электроприводов на ЦКУР с адаптированным программным обеспечением Mark IV Field System;
- приём и исполнение команд и целеуказаний ЦКУР.
РСКУ выполнена в конструктиве блока для установки в штатную стойку либо на стол.
Управляющий компьютер
В качестве управляющего компьютера системы наведения радиотелескопа была выбрана платформа промышленного персонального компьютера. Данная платформа представляет собой пассивную объединительную плату (кросс-плату) c набором слотов для подключения плат расширения, включая процессорную плату. Для подключения процессорной платы используется интерфейс PICMG 1.0. Это наиболее распространенный формат полноразмерных процессорных плат с поддержкой шин расширения PCI и ISA.
Для выполнения задач коммуникации с аппаратурой наведения используются следующие платы расширения:
- PIO-D96 - плата цифрового ввода/вывода (используются 2 штуки)
- PIO-DA8 - плата аналогового вывода и цифрового ввода/вывода
- ПТ.ПК-5 - плата АЦП двухканальная на шине ISA-8
Алгоритмы и программы управления
В системе реализованы два основных алгоритма управления - переброс и сопровождение.
Алгоритм переброса может быть описан следующим образом. При поступлении команды на переброс антенны, система включает большую скорость, включает привода и линейным образом в течение определенного промежутка времени начинает увеличивать управляющее напряжение на приводах в соответствии с направлением движения. При достижении максимального по абсолютной величине напряжения система держит его вплоть до попадания антенны в заданную окрестность по данной координате, далее система начинает сбавлять управляющее напряжение пропорционально ошибке до нуля. Все постоянные, определяющие размеры окрестностей, скорости разгона и торможения определены в файле заголовков. Эти постоянные могут быть легко изменены, что дает возможность для настройки системы. Также реализуется возможность тонкой подстройки при изменении условий работы телескопа. Это, в частности, необходимо при смене сезона. Заметим, что антенна в обсерватории Бадары летом работает при температуре + 40, а зимой при - 40°С.
В алгоритме сопровождения управляющее напряжение вырабатывается пропорционально трем величинам:
- мгновенной ошибке наведения;
- интегральной ошибке наведения;
Такой алгоритм управления известен, как ПИ-алгоритм (пропорционально - интегрирующий).
Численные значения коэффициентов предварительно были рассчитаны теоретически, а затем их значения подвергались эмпирической коррекции. Дело в том, что помимо некоторых усредненных характеристик привода антенны, которые можно описать теоретически в терминах теории управления, существует целый ряд нелинейных эффектов, которые на данном этапе не были исследованы достаточно подробно. Поэтому коэффициенты подвергались эмпирической коррекции. Это позволило эффективно нейтрализовать влияние различных нелинейностей электропривода антенны.
Следует отметить также, что при отработке поправок, а также при сканировании радиоисточника, иными словами при любых резких изменениях траектории движения антенны, программа слежения сбрасывает интегральную ошибку. Делается это для того, чтобы обеспечить более быструю реакцию электропривода антенны на смену направления движения.
Программное обеспечение
Системное программное обеспечение.
Для функционирования программного обеспечения РСКУ на управляющем компьютере установлены следующие системные компоненты:
- Операционная система Linux (Scientific Linux 5.5 с ядром 2.6),
- драйверы для плат расширения PIO-D96 и PIO-DA8.
Программное обеспечение РСКУ
Программное обеспечение РСКУ состоит из одного исполняемого модуля реализующего все алгоритмы управлеия, обмен данными и графический интерфейс пользователя.
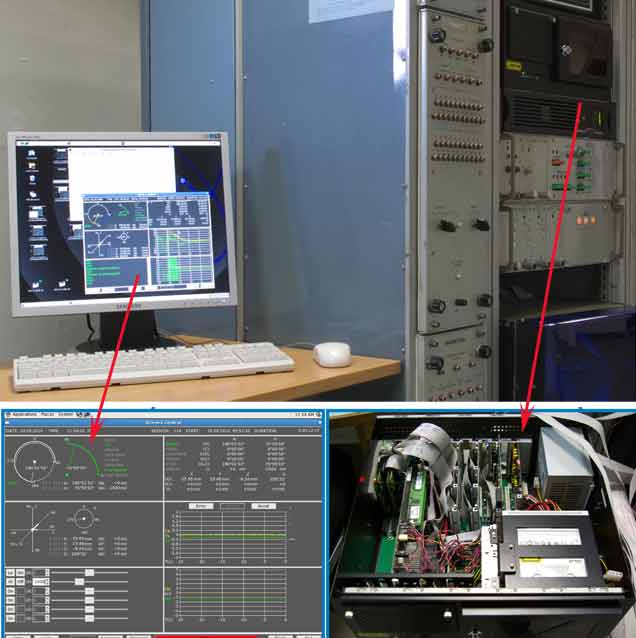
Графический экран состоит из строки статуса и шести экранов,
- экрана состояния главного привода,
- экрана состояния контррефлектора,
- консоли оператора,
- информационного окна,
- окна графиков положения (скорости, ускорения)
- окна графиков напряжения.
В строке статуса отображается текущая дата, время (UTC), номер сеанса, время начала и продолжительность сеанса.
В окне состояния главного привода отображается текущее положение антенны по азимуту и по углу места, как графически, так и численно, а также квитанции главного привода.
В окне состояния контррефлектора отображается информация о положении и о состоянии приводов контррефлектора. Окно консоли оператора в режиме внешнего управления от ЦКУР отображает потоки команд и сообщений, а врежиме местного управления позволяет выполнять переуставновку главного зеркала и контррефлектора изменением управляющего напряжение на соответствующем приводе или простым заданием требуемого положения.
В информационном окне собрана вся численная информация о работе системы. Помимо координат главного зеркала и контррефлектора, а также соответствующих управляющих напряжений в информационном экране отображаются заданные координаты зеркала и контррефлектора, а также ошибки наведения.
В окнах графиков положения антенны по азимуту и углу места, а так же соответствующие управляющие напряжения.
Связь с центральным компьютером
Связь с ЦКУР осуществляется по последовательному интерфейсу RS-232 через компьютер консоли оператора наведения, который связан с ЦКУР по локальной сети Ethernet. Этот компьютер выполняет две функции. Во-первых он транслирует информационные сообщения о состоянии антенны от РСКУ в ЦКУР и обратно - команды наведения, а во-вторых отображает состояния приводов, время и координаты на дисплее в комнате операторов.
Связь между РСКУ и ЦКУР устанавливается по инициативе последнего по команде INIT. После приема команды INIT программа наведения выполняет подготовительные действия, выдает ключевое слово READY 3 и с этого момента начинает десять раз в секунду выдавать информационное сообщение о состоянии антенны.